線性搬運(yùn)領(lǐng)航人的提案
新一代工廠搬運(yùn)平臺
無價(jià)值作業(yè) 時(shí)間趨近于零����。
單純搬運(yùn)工件的時(shí)間為無價(jià)值時(shí)間�。
雅馬哈線性傳送帶模塊LCMR200的搬運(yùn)部 分也實(shí)現(xiàn)了機(jī)器人化�,無價(jià)值作業(yè)時(shí)間趨近于零。


● 小間距可高速搬運(yùn)
● 識別各ID
● 完全絕對式無需原點(diǎn)復(fù)歸
● 內(nèi)置驅(qū)動(dòng)器省接線
從“傳送”到“移動(dòng)”���?����?蓽p少搬運(yùn)作業(yè)的無用功,提高收益���。

01 縮短搬運(yùn)時(shí)間〈 LCMR200與以往傳送帶的作業(yè)工序比較 〉


02 舊式傳送帶與最新線性傳送帶的徹底比較

改善搬運(yùn)環(huán)境�,性能優(yōu)越���。
01 無需原點(diǎn)復(fù)歸
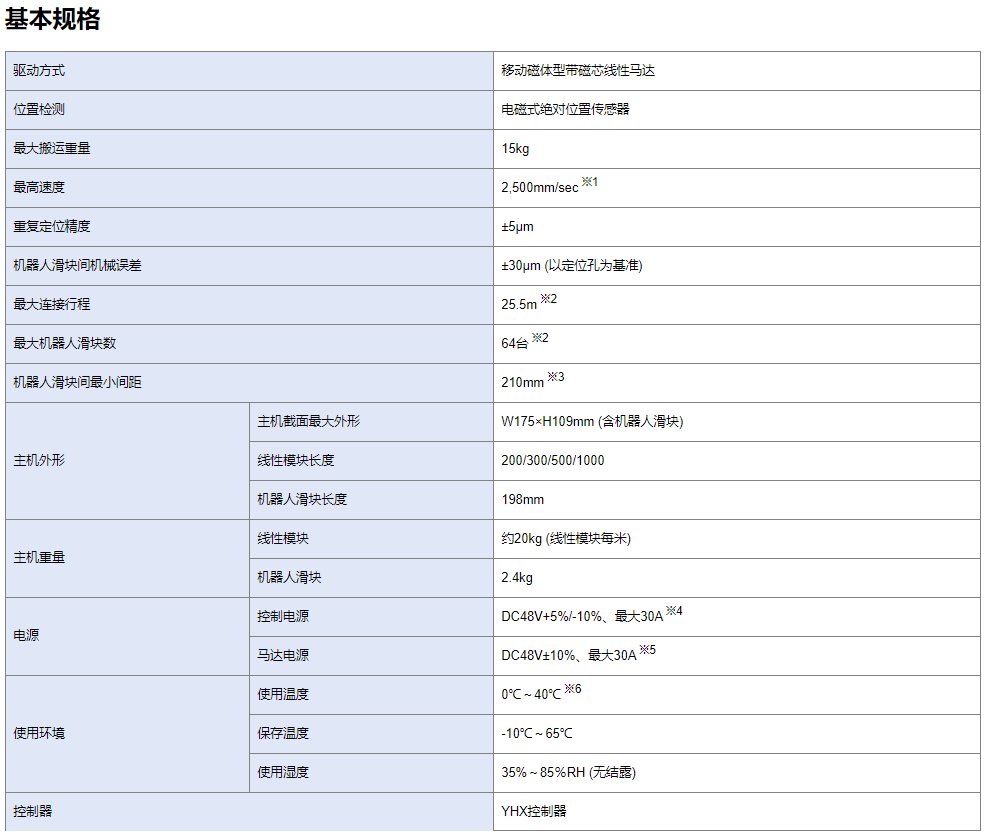
采用了新開發(fā)的高精度全范圍絕對式傳感器���,無需進(jìn)行原點(diǎn)復(fù)歸?��?珊唵蔚剡M(jìn)行動(dòng)作的開始和停止操作���,啟動(dòng)恢復(fù)時(shí)也不會(huì)浪費(fèi)時(shí)間�。


02 使用連接板和連接單元的簡單連接
模塊通過連接板進(jìn)行機(jī)械定位����,通過連接單元進(jìn)行模塊間的通信連接?�?稍诙虝r(shí)間內(nèi)進(jìn)行高再現(xiàn)性和高可靠性的安裝��。

03 可靠近安裝往返模塊����,從而節(jié)省空間
〈 可選擇電纜取出方向 正面 背面 〉


可選擇模塊的電纜取出方向。安裝至裝置上時(shí)��,電氣接線的自由度更高��。尤其在水平循環(huán)布局時(shí)�,將往返模塊的電纜取出方向設(shè)為相反,模塊最近可靠近至200mm�����,從而可縮短循環(huán)時(shí)的周期時(shí)間���,減少安裝空間���。此外��,顯示模塊狀態(tài)的LED指示器從模塊的正面���、背面均可識別。


04 薄型結(jié)構(gòu)
采用了新開發(fā)的線性馬達(dá)��,使模塊的高度與LCM100相比約降低30%����??捎行Ю门_架下方的空間。

05 內(nèi)置驅(qū)動(dòng)器的省接線設(shè)計(jì)
采用了模塊主體中內(nèi)置有馬達(dá)驅(qū)動(dòng)器的一體構(gòu)造����,因此只要用YQLink電纜連接至YHX控制器即可控制整個(gè)LCMR200。還有助于節(jié)省控制柜內(nèi)的空間���。


06 所有滑塊均可獨(dú)立動(dòng)作
可對各動(dòng)作單獨(dú)設(shè)定速度���、加速度����,所有滑塊均可在任意時(shí)間自由自在地移動(dòng)�。

07 采用頂蓋以防止異物進(jìn)入(減少間隙)
為了避免使各作業(yè)工序的異物掉落成為主要故障原因,在頂面安裝了用于保護(hù)導(dǎo)軌�����、馬達(dá)及傳感器的頂蓋����。
08 滑塊間機(jī)械誤差±30μm (以定位孔為基準(zhǔn))
當(dāng)使多個(gè)滑塊依次停在任意1個(gè)坐標(biāo)點(diǎn)時(shí),根據(jù)各滑塊的不同�����,實(shí)際停止位置會(huì)略有偏差��,因此具有機(jī)械誤差(相互差)�����,LCMR200可將該滑塊間的機(jī)械誤差控制在±30μm����,因此最適于高精度工序���。還因無需RFID等,可降低成本����。
09 由YHX控制器集中控制
可控制包括動(dòng)作環(huán)境在內(nèi)的搬運(yùn)工序中的所有滑塊和單軸機(jī)器人。
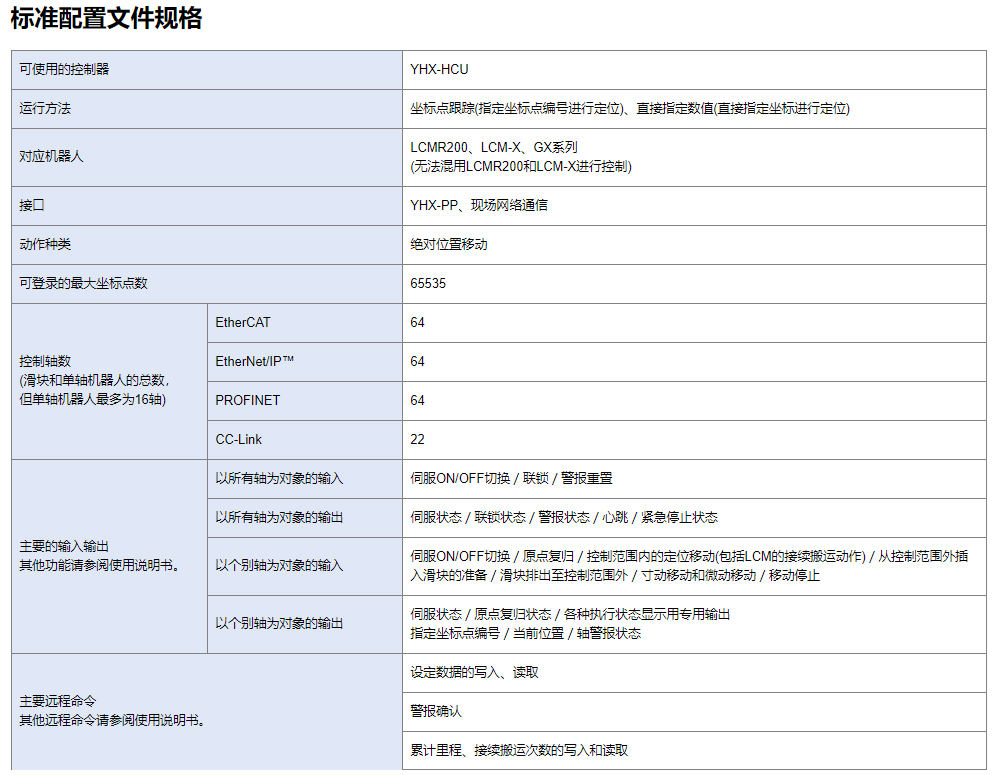
10 由標(biāo)準(zhǔn)配置文件簡單控制
根據(jù)高位PLC的指令��,使滑塊和單軸機(jī)器人作為定位器進(jìn)行動(dòng)作的簡單控制方式�。
實(shí)現(xiàn)了具有通用性與高附加值的工序間搬運(yùn)。
縮短了搬運(yùn)節(jié)拍��,使設(shè)備更節(jié)省空間��。有助于增強(qiáng)生產(chǎn)能力���,強(qiáng)化成本競爭力。
01 工序共享化
【直接驅(qū)動(dòng)】【滑塊逆行】


● 由于可使滑塊逆行����,相同的工序可通用,有利于降低成本���,實(shí)現(xiàn)搬運(yùn)線的小型化�����。
● 可進(jìn)行高速往復(fù)動(dòng)作�,或僅使部分滑塊后退等靈活的動(dòng)作。

02 在節(jié)拍不同的工序間高效移動(dòng)
【直接驅(qū)動(dòng)】【小間距動(dòng)作】



● 因采用了基于伺服控制的直接驅(qū)動(dòng)����,無需安裝停止用機(jī)械限位器或傳感器。
● 停止位置的設(shè)定只需變更坐標(biāo)點(diǎn)即可��,可在短時(shí)間內(nèi)完成�����。
● 可靈活應(yīng)對因品種變更而產(chǎn)生的頻繁的換產(chǎn)調(diào)整����。
● 可進(jìn)行小間距移動(dòng),因此短時(shí)間工序時(shí)可在同一工序內(nèi)進(jìn)行間距進(jìn)給���,而長時(shí)間工序時(shí)則可通過整體的高速移動(dòng)來縮短移動(dòng)時(shí)間�����。

03 無須工件引入
【高剛性導(dǎo)軌】

● 采用了高剛性導(dǎo)軌��,因此可在搬運(yùn)線上進(jìn)行組裝�、加工。
● 省去了從搬運(yùn)線引入工作臺的工序�,可精簡裝置、降低成本���。
04 維護(hù)簡便 / 萬一發(fā)生故障時(shí)也放心
● 采用頂蓋�����,防止墜落物(異物)混入��。
● 采用環(huán)境適應(yīng)性強(qiáng)的磁力傳感器����,抗污垢性強(qiáng)����。
● 采用一鍵定位,無需復(fù)雜地調(diào)整精度�����。
● 馬達(dá)�、刻度尺采用非接觸方式,不會(huì)磨損�����。
● 滑動(dòng)部分只包括導(dǎo)軌����,不易起塵。
● 零件均實(shí)施了標(biāo)準(zhǔn)化�����,作為維護(hù)零件易于攜帶��。
● 零件更換簡單方便����。
● 萬一發(fā)生故障,僅需替換滑塊或線性模塊即可恢復(fù)���,可將生產(chǎn)線停頓時(shí)間控制到最少���。
不浪費(fèi)的簡單結(jié)構(gòu)。
可輕松地構(gòu)建起自由度高的搬運(yùn)系統(tǒng)。
搬運(yùn)工序中的所有滑塊動(dòng)作及周邊的單軸機(jī)器人均可從高位PLC經(jīng)由1臺YHX控制器進(jìn)行控制���?����?筛咝Ф唵蔚貥?gòu)建自動(dòng)化生產(chǎn)線��。
01 可構(gòu)建靈活的生產(chǎn)線
● 模塊與循環(huán)單元組合的布局示例
水平循環(huán)示例
更多詳情請?jiān)L問YAMAHA官網(wǎng)<<點(diǎn)此鏈接>>